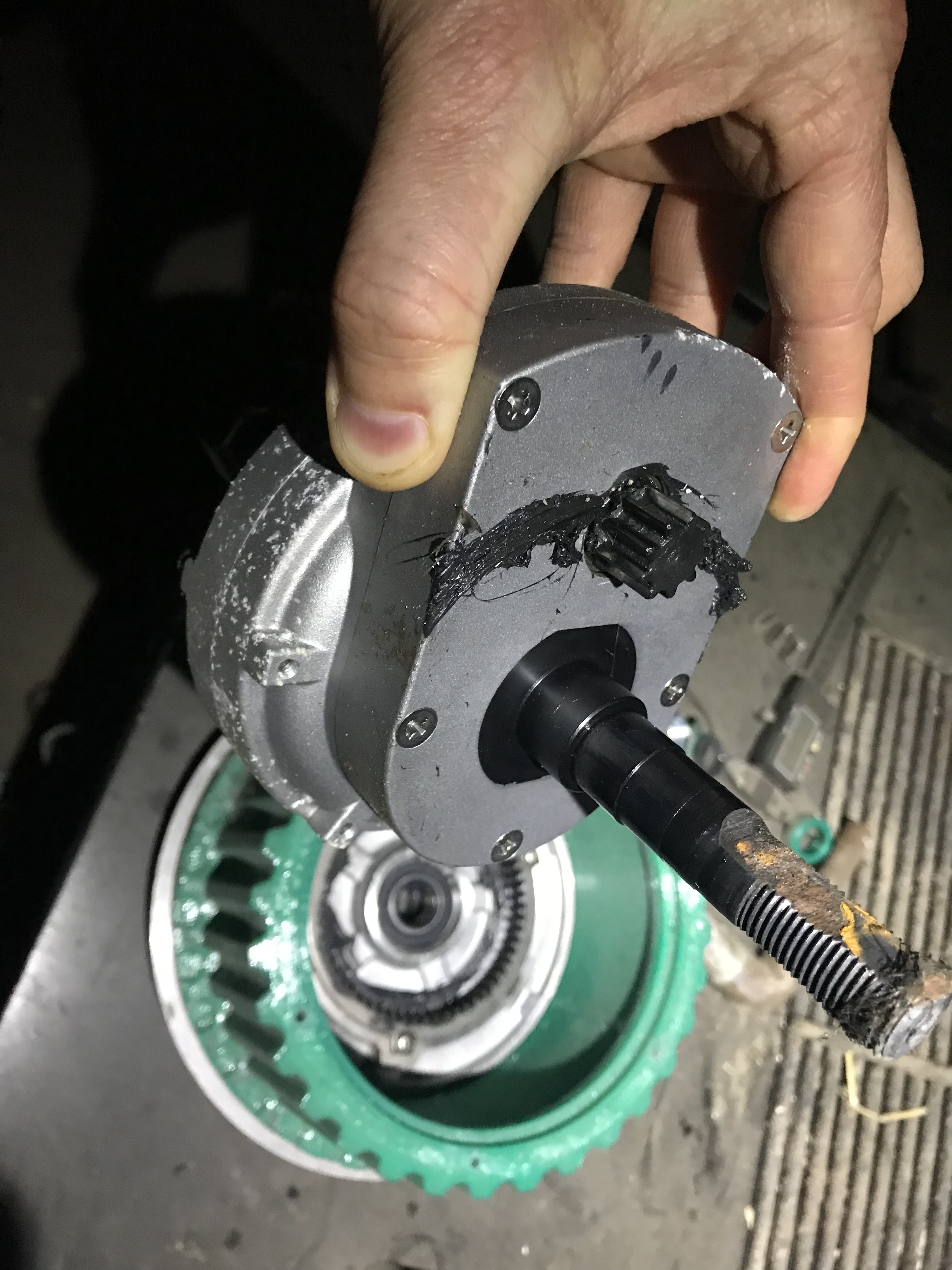
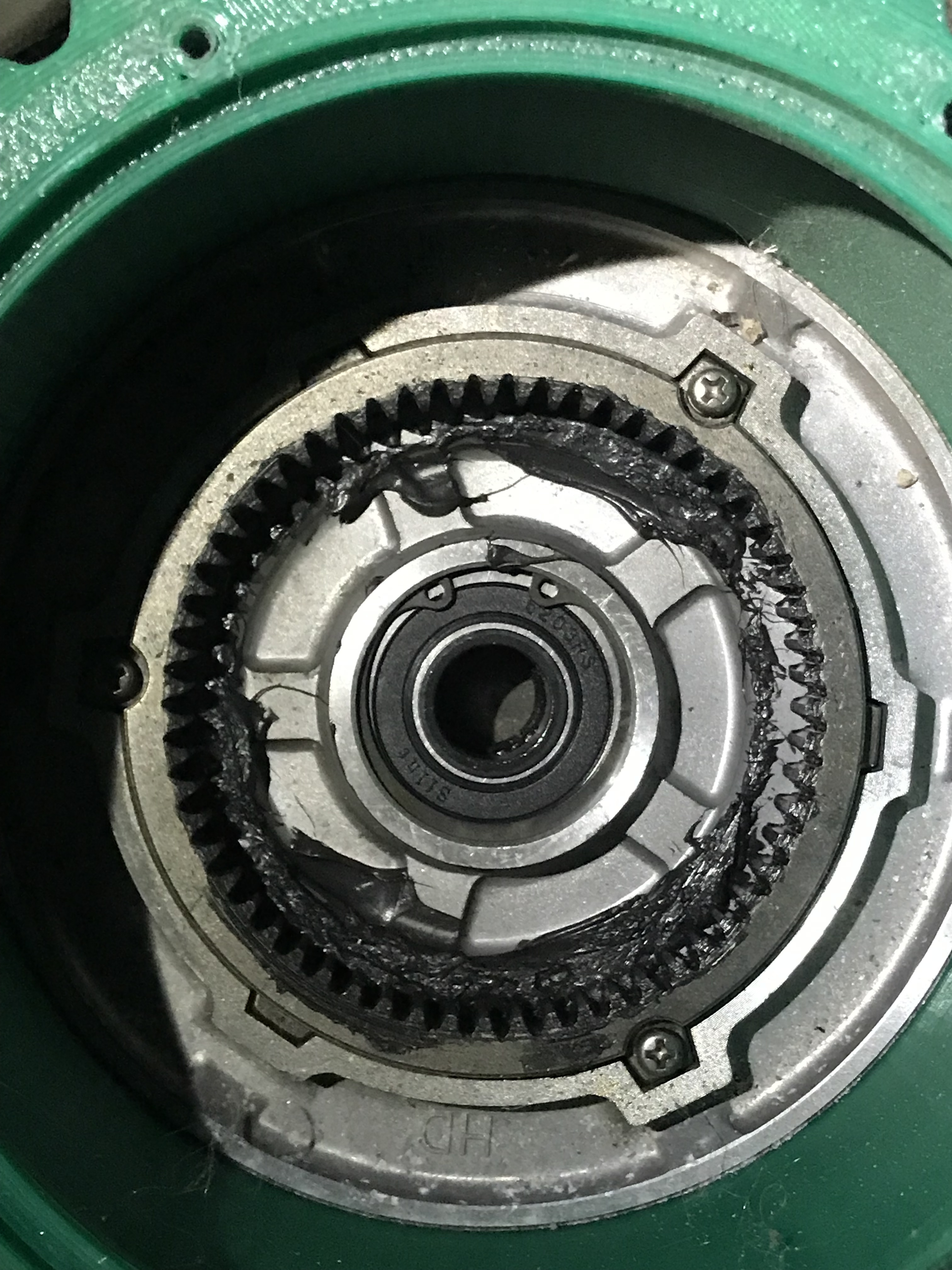
Some quick photos. Looks like two stage reduction. I want to pop that cover off and see what the internal gear is. Note that the shaft does not go through the motor. The motor housing is structural. I’ll have to share more internal photos when I have a chance.