I haven’t had a chance to go through the full open source files yet, but I immediately noticed in the photos a motor to a sprocket chain drive reduction for steering and drive.
In all weather environments and with plant materials able to be pinched into the interface, I wonder at the selection reasoning.
There are numerous solutions and I’d like to start the discussion around the current choices, the failure modes, cost points, etc.
Thanks Sean! You’re right that the chain drive system wasn’t great. We started with that system because the alternative was hub motors which usually don’t have suitable torque levels or if they do, they are very inefficient at high torque and low speed.
We have however replaced that chain drive system (promo video was filmed in august) as it quickly filled up with junk once the rains came! I found hubmotors designed for wheelbarrows that have higher internal gearing and I modified them to accept bike wheels.
This assembly feels a little complex though so I plan to continue exploring options. One thing is for sure, our design is very fluid at the moment. So far I do like the new motors though.
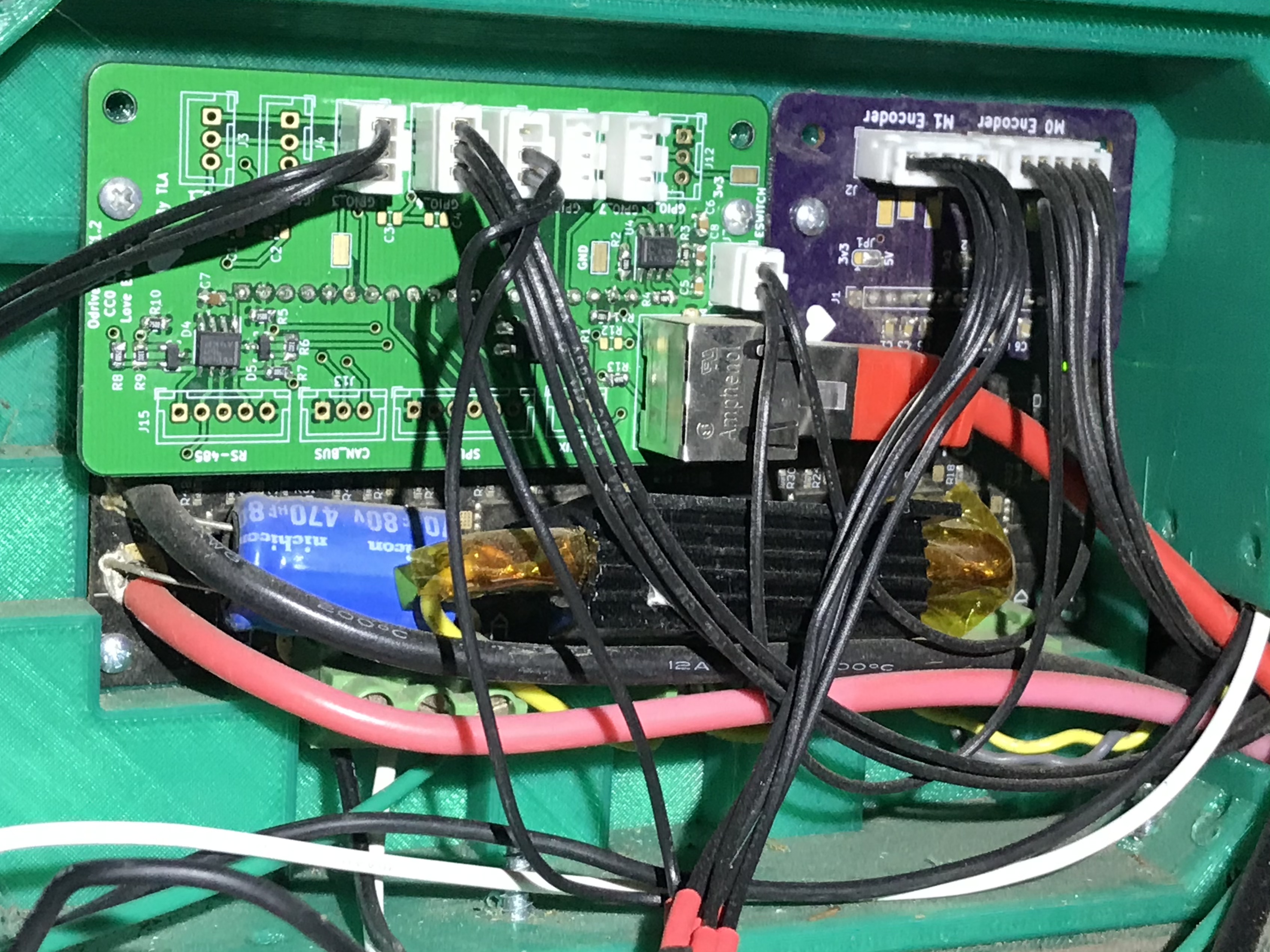
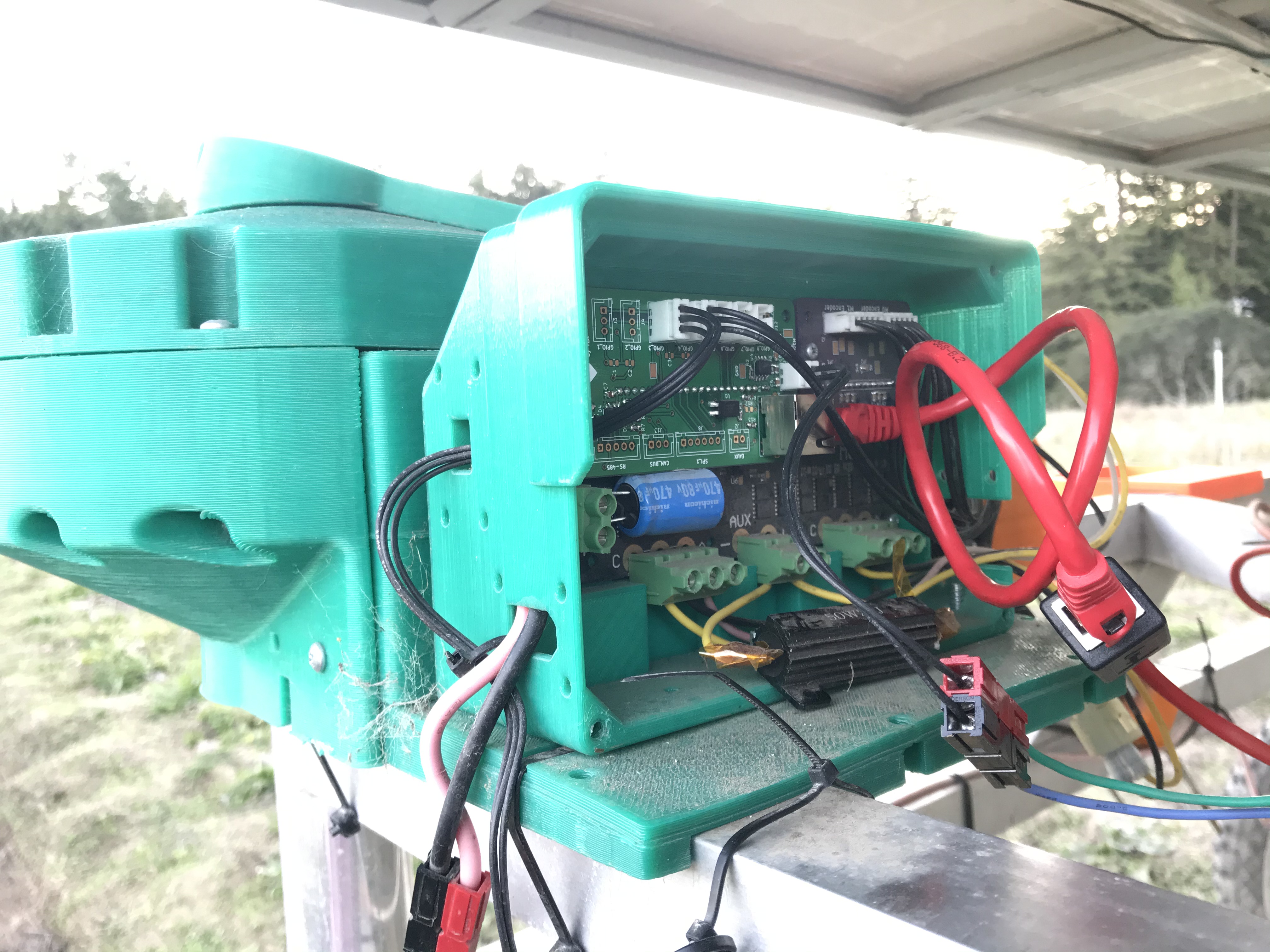
For controllers we are using Odrive which is excellent. I’ve created some support boards for the Odrive which are on my personal GitHub (open sourced before we made a twisted fields account) and since the source is open on Odrive I was able to add brushed motor support for steering.
Odrive is working on their v4 which they say will be robust for industrial use. So that should be an interesting option.
Here’s the steering motor we’re going to use for V2 of acorn. V1 uses their 226 motor which isn’t sealed:
Also here is the current prototype electronics enclosure for reference. Obviously this is messy as more and more has gotten added to it. I’m going to move from 3D printed enclosures to off the shelf weather sealed boxed for V2:
We calculated that we’d want about 90Nm of torque on each drive wheel to take the vehicle loaded with tools for a total estimated mass of 500lbs/220kg up a 30 degree slope.
If we don’t use hub motors we have to transmit torque to the wheel somehow, and I’ve not found a cleaner way of doing that.
For steering we have an absolute rotation sensor that can sense multiple rotations, so the wheels are allowed about 3 full rotations before we start throwing safety errors. But with the current control code they never move more than +-90 degrees. The vehicle is capable of driving completely sideways, and if you also steer while driving sideways you’d want to exceed +/- 90 degree rotation. That’s not implemented however.
Our specs are guesses until we get some tools mounted and really start doing work. But in my experience this level of torque seems warranted. One thing that’s interesting about the farm is that the ground can sometimes get very uneven. Like after it rains and everything turns to mud, then the tractor drives through and makes a huge rut in the mud, and then the sun comes out and hardens it and you have a 1 foot deep 1 foot wide rut that’s now solid. Other challenges come when acorn needs to drive over a 4” irrigation pipe up a hill. Or when you drive up a curved part of ground and one front wheel goes in the air while the opposite wheel bounces off the ground, so now you only have two wheels with traction to keep you moving and you need enough torque with just those two.
It’s not clear to me how much “off roading” will be required in practical use, so we could relax these requirements if it’s only getting used on level ground. But things are pretty uneven at our farm.
And the 90Nm of torque assumes a 26” wheel. We could use smaller wheels and I’ve been thinking about it. But the large wheels have some advantages so I want to keep testing with them for a while. 16-20” wheels would give us more fully integrated hub motor and wheel combos to choose from instead of this custom setup.
That’s excellent information, very thorough! That’s about 25kg of vertical lift power per wheel that’s engaged, so at 30°, 50kg per engaged wheel. There’s no suspension on the vehicle so 2 wheels is the only guarantee for full traction but using 2.25-2.75 as the “wheel factor” is safe since it will rock to a third wheel generally. So 115kg-137kg for a vehicle weight on your slope conditions.
(Do check my math)
I agree a hub wheel is going to be the best, a CV shaft isn’t suitable due to wanting full underbelly clearance as a work area.
What’s the top speed up slope you would be thinking? 2mph? 5?
Unlike a lot of farm vehicles that drag purely mechanical tools, I’m particularly keen on precision robotic tools guided by a vision system. That will require somewhat slower operation (with an advantage in precision), so under those conditions I would expect it to move pretty slowly. But with the current drive system it can move pretty fast.
Onboard the vehicle we record all GPS points at 10hz and after every meter of travel we collapse those in to a segment sample with distance, time, and power draw data, so I could look up what our current actual top speed is next week.
The hub motors look a massive improvement but does this mean it only has active braking? Just wondering if you lose power while on a hill (or all of the odrives decide to error out simultaneously and not reset) then does it ‘autonomously drive’ to the bottom?
That’s a great question Dale. Even if the motor has high cogging it won’t be a truly effective brake when off.
An integrated normally closed brake would make sense from a safety perspective but would be terrible from an energy perspective and a latching brake requires an active actuation.
Sudden power loss is very unlikely and can be easily avoided, so a latching brake or pawl would make a lot of sense. Cost is an issue though whenever you add a system that must be replicated on multiple wheels.
Yes, with these hub motors some kind of braking system is needed. If you e-stop the system or the controllers fault, it will roll quickly down a hill. Cheapest way to add some braking resistance is to modify motor controller firmware to short the bottom FETs together any time the motors are not enabled. Obviously that requires power, so a circuit with normally closed relays would do the trick too. While it helps a lot, shorting leads is not a perfect brake. Some kind of mechanical brake would be interesting to consider. In the short term I plan to add the firmware change, as controller firmware seems stable. Just don’t park it on a hill overnight when it will lose power.
Even shorting the motor leads provides only an extreme eddy brake, it only works in motion.
An e-stop system can be a soft e-stop which is managed by a control circuit and engages a latching mechanical brake. That’s the most robust solution while maintaining a zero continuous energy requirement.
Is a soft e-stop activating a latching mechanical brake good enough for safety standards?
I love the idea and I realise that losing power is highly unlikely but it can still happen and so surely it needs to be allowed for?
Components fail.
It just takes something to fail badly enough to trip your main protective device.
In the past I did some experimenting with a NC relay shorting the 3 motor phases together on power loss just for this purpose and can confirm Sean is correct. It did make a stationary wheel harder to turn too but it would have still rolled down a hill slowly. There was also the potential issue of damaging the motor when shorting phases when travelling at speed. Any attempt to reduce that current will of course reduce the braking effect too.
We’ll have to do a full safety review when the time comes. For now I want to see how it behaves with all motor leads shorted and go from there. It of course is possible to add a full brake system, but this adds cost, complexity, and weight. In situations where the vehicle has power, we can turn the wheels in opposing directions to prevent it from rolling. If the worst case under power loss is slow movement that may be acceptable. The machine is light enough I can hold it back with one hand if it is trying to free roll (even without the motor leads shorted).
Yes, that’s what I was saying was just orienting then perpendicular (orthogonal) to each other. Form an “X”. I believe that a soft e-stop with a hard e-stop secondary would be sufficient.
The likelihood of unexpected catastrophic failure is very minor if the electrical is closed from finger and water ingress.
It’s an extreme rating, but an IP69K rating is a real rating for industrial and agricultural equipment. Things get muddy and some fool will blast every exposed cable and component with a pressure washer.
This rating is also finger ingress proof so it would take an external blows from another vehicle, tree limb, etc to cause damage as the vehicle is not generally operating in a speed or condition to damage itself.
Is there any objective that would include earth-disturbing attachments for very minor plowing or some form of surface-disturbing cultivation? If so, is that included in the above estimation?
If not, is the cultivation emphasis going to be on one or more of the following?
Pulling weeds
Snipping weeds
Applying an herbicide
Releasing beneficial insects (a long shot, but rounds out the list)