Some scenarios warrant consideration of of a wireless capability, such as;
Receive the day’s weather forecast, to plan power consumption and the day’s objectives.
Receive warning of an impending high wind or hale situation for it to return to a shed or other emergency sheltering place.
Receive instructions for assignment update (e.g., “shift to cultivating the rows of bell peppers”)
Communicate a heartbeat or warning/error status
Communicate an image of a new unknown plant/object (or access an online plant identification app to automate the learning process)
If there is to be any wireless communication with a local monitoring unit and/or the outside world, options include;
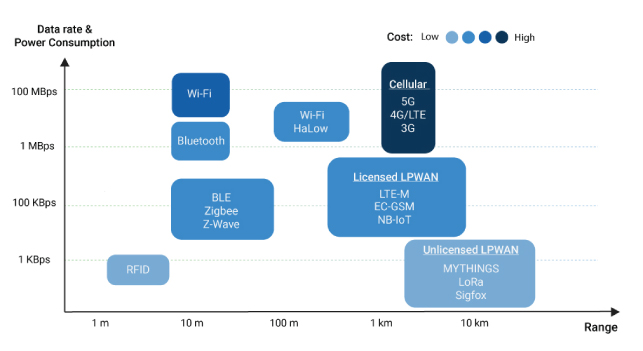
WiFi:
– Pros: high bandwith
– Cons: short range (when considering field/pasture acreage). Some range extensions are available, though may still be insufficient depending on the acreage, layout, and/or interceding hills
Low Power WAN (unlicensed LPWAN), with examples including;
– MyThings
– LoRa: (non-continuous, only wakes at specific times [LoRaWAN limitations])
– SigFox: (a maximum packet payload of 12 Bytes, and a number of packets per device that cannot exceed 14 packets/day)
Pros: up to 10km
Cons: Low data rate (~10kbps at 1km)
WiFi HaLow
–Pros: up to 1km range
–Cons: Lower frequencies have lower bandwidth (e.g., 1 km range at ~100kps)
SDRs (example: Lime Mini)
–Pros: High flexibility in frequency choice
–Cons: Additional configuration required
But I don’t know what kind of bandwidth to expect from that. I have been curious about LoraWAN too. I have experience with low data rate sub ghz systems and I really like the range they offer.
We’re using WiFi for now with an Ubiquity Unifi mesh network. It’s a mild PITA but at least it is flexible.
I’ve just started drawing video data off of Acorn today from the new camera system, and some kind of high bandwidth link will be important. I’ve been using high powered 2.4GHz wireless so far due to the range advantage, but I may want to add 5GHz as well for speed when available.
We do require a heartbeat to the server or Acorn will stop driving. It’s a good indicator of issues when I see those stops in the error logs.
Also one key part of the wireless is for RTK GPS correction data. To accurately solve for its GPS location it must have periodic updates. I’m not sure what update rate is strictly required but if GPS base station data is 20 seconds old we stop driving, though I think that could be relaxed to maybe 5 minutes.
What are the use cases for video, or is that really just for early prototyping?
If video is deemed necessary, what resolution and frame rate are considered minimums? Doing object detection outside at home, I really only use 2 frames/sec FHD. I can record at much higher rates, of course, though what the rover needs will depend on the use cases.
Well I think we will want to use higher resolution imaging when building the dataset, even if we train at lower resolutions. This will allow us more flexibility, and allows for some interesting other post processing work. So for example I recorded two 4k 15fps videos from the onboard cameras for 100 meters of travel, and while I can set the bitrate to whatever I want that capture at the moment added up to 2.4GB.
I have this idea that we will some day be able to create high resolution 3D reconstructions of the ground Acorn travels over, which could provide clear photographic views of everything at the farm close up. This would be useful for labeling images and just keeping an eye on things.
And then there is the question of whether we want to do ML processing onboard (I think yes) or stream video to a high powered server nearby for recognition. If we do the latter we would need a very good wireless link.
At a minimum we need to be able to get lots of high resolution data off of it for labeling. Dataset creation will never be finished, so I see it as an important function in the field. However there may be cases where a fixed model is “good enough” and only a low bandwidth connection for RTK corrections is needed.
When you say ML onboard, shall we assume you are always referring to inferencing, for those who may be reading this? IMO, a strong case could be made for exactly that, as increasing levels of autonomy make for a more resilient agribot that is not tied tightly to the base station for every little thing.
I agree about the “good enough” and low bandwidth connections for both RTK corrections and new plant object ‘discoveries’.
Well, given that the two premiums cost wise are bandwidth and data storage, data storage also increasing processing cost, there is always he age old question of how much is enough.
4k is likely massive overkill, though it’s easier to start with overkill and then produce increasingly lower bitrate datasets from the same original high bitrate set and train identical models off of then until a minimum resolution and bitrate is identified. Likewise 60fps video may be overkill vs a high shutter speed high resolution image at say 2fps.
Communication too. A few hundred GB of storage is cheap, even 1-3 TB, but transfer at high rates and distance is not. Automatic retrieval is preferred, so a combo of an overseer network using a low bandwidth long range system and a high bandwidth short-range 5Ghz WiFi for when near the home station is maybe the best of both worlds.
4k is only 8.5 megapixels and depending on your field of view it ends up not being a whole lot of pixel density. I am currently using wide angle lenses so you can see plants from multiple angles and see the front of the robot as well as the rear where tools will be in one image. This will allow for good automatic synchronization between tools and cameras (“hand” eye coordination).
I have four 4k cameras on my Rover robot and while it is a LOT of data and often is not needed, there are times where you want a closer look at something.
If you’re a farmer and you’re in the field and you see something odd, you’re going to bend down and look more closely. Unless you’re going to physically move the cameras or add optical zoom the only way to get a closer look is to be able to digitally zoom in, so to me that means higher resolution sensors that you often run at lower resolution.
My personal camera from 2017 is 20 megapixels, and it can shoot 6K video, which I have found helpful for some machine vision (photogrammetry) experiments.
That said the optics matter just as much. Right now we are using these relatively low cost machine vision cameras, and it is obvious to me that the biggest limiting factor is optics:
We have basically the first prototype of a vision system onboard and it is going to be an evolving design as things progress.
Check out openMV https://openmv.io/
MicroPython based machine vision platform. Camera included, Cortex M7, Arduino compatible. Also supports tensor flow and other DL methods.
I use MicroPython almost exclusively for automotive and IoT commercial applications. It rocks!
For enhanced navigation, you could borrow something I saw used by drones. Tie colored ribbons at various locations. These blobs are easy to spot.
Sending video via RF will be a big problem, especially in agriculture. You simply can’t send WiFi over more than a couple of hundred feet, not to mention the power drain on your batteries. Adding APs can help, but only if you have a BIG battery or AC power. Long range RF links like LoRa are simply too bandwidth limited. So it’s best to have as much on-board video processing as possible. Photo images of crops can be stored to flash for later download.
Excellent summary @WillStewart . I design telemetry for agriculture. It’s tough and and there are a lot of tradeoffs. You have to worry about minimizing power, and maximizing battery life (no AC plugs in a corn field) and it has to be able to stand up to some pretty brutal environmental conditions. But that’s what makes it fun.
As a general rule, longer distance means low data rate, sometimes under 1K baud (don’t believe the marketing claims). I’ve been using proprietary 900MHz RF modules and now starting to use LoRa in P2P topology. 1200-9600 baud is the sweet spot. Also there are FCC regs you have to make sure you comply with. Even LTE CAT1 IoT is limited to under 200Kbaud and is VERY expensive–charged by the megabyte. Yikes!
@bradstew , your ag experiences are invaluable. My comm summary is based on specs, seat of the pants by some ag users, and generalization. Any tips on correcting/clarifying any points/ranges/rates would be very helpful.
Wow, great conversation! My apologies in advance as I come up to speed. I’d created a Requirement Backlog list (Requirements Backlog - #2 by RajD) to capture Requirements - User Stories. Not sure if thats useful/effective, but we need a way of centralising, categorising and up/down voting and prioritising needs, so they can be later fleshed out and roadmapped. I’m happy to help solve that with you.
On comms;-
whats the “real need” for Near Real Time NRT data comms and video?
@WillStewart had a good suggestion to store/process locally on SD card. Then perhaps process and data-stream as/when the link allows, with adequee buffering. Or Return to Base (RtB) range and upload.
Local WiFi as a platform protocol standard, could simply access a shared WiFi Hotspot from an cheap old Android phone, planted on the device over 4G/5G. User chooses/upgrades the phone/connection.
Compute processing and storage could even be “offloaded” to the local mobile phone app over localised WiFi and results returned/replicated.
Current State information to a secure MQTT server on a Pi, might be an ideal storage protocol. That could be asynchronously replicated to multiple data peers. MQTT peers hosted on local Pi, local Phone app, HomeFarm MQTT container server (docker), Internet cloud servers.
Offers mobile phone localised control over Wifi, faster, when you come in range.
Local WiFi hotspot can be shared with other low cost in-field wifi solar powered sensors as it passes them, to collect data on soil PH, moisture etc.
Platform could integrate with Farm wide Mesh Wifi network (like Ubiquiti or starlink), or itself act as a Mesh Wifi AP.
Pls BEWARE: frequency standards/restrictions in USA are different to many other countries. @bradstew mentions proprietary 900MHz RF. We’ve seen recent bans in Australia of smart/IoT devices from USA, regulatory controls which are strictly and heavily enforced and actively scanned. Hence global protocol standards are needed.
Just sharing my Farm Wifi experience:-
I’ve used Shelley Cloud (https://shelly.cloud) 12v wifi relay controllers for pumps etc, at my farm which host their own little web server locally in the device. To update programmable configs/control, I bring into range an Android phone with 4g/5g sim card as a shared Wifi Hot Spot as I drive around, or place it near the wifi relay device.
My eventual goal is for farm wide WiFi - I’d also concluded on Ubiquity Unifi Mesh like @taylor mentioned. Now I have a solar powered 12v 4G/5G sim Router connected to a Mesh network (Datto OpenMesh - EOL) WAP, broadcasting 50m before signal drops. Single 200w Solar panel with 120AH AGM battery has been fine.
I’m to experiment placing an old parabolic sattelite dish at the right distance behind my WAP (Wireless Access Point) to boost my wifi broadcast signal about 3km Line of Sight, according to internet experiments. The Wifi signal for internet download inbound to devices is OK. But ofcourse device outbound to WAP for internet upload is not improved. A periodic Wifi booster, perhaps directional might work.
There are legal frequencies for Australia in the 900MHz region. Some solutions that are available in the US need to be either modified or restricted to work in the Australian context