I am wondering why you do not just adapt a recycled electric wheelchair as your mobility unit as they can often be gotten for $100.00 or less and the money can go to the software and electronics.
Hi everyone. I have been experimenting with building something similar to Acorn with 50% size for a while now. I used a ardupilot flight controller (pixhawk) and configured it for navigating a skid steer vehicle like this. In addition I used ardusimple GPS sensor with RTK and a motor controller from Cytron. Everything is currently build with aluminium profile bars - which is very nice for fast prototyping. I plan to build it a little bigger as soon as the rest is working as expected. I am a bit focused on market garding with only 80cm bed-width - so I will not build it much wider than that.
Currently I am working on making the drivetrain more durable.
Afterwards I am thinking of adding some weeding tools inspired by Romi ( The Rover for Weeding | ROMI: Robotics for Microfarms. )
It is currently not close to the durability of Acorn but still it has some similarities and I thought it might be interesting for people to see. I also plan to publish it open source as soon as I have a design is more or less finalized.
I just came across acorn on Youtube and great to see.
I am a farmer in rural Australia, I have no robotics experience so I thought I would start small and create a mower sized farm bot before going full size, here’s some pictures of it (from a few months back). Jetson nano 4g hat, Independent steering. RTK + Base, LIDAR, Dual 160 degree cameras, Geared hub motors, magnetic encoders for steering with dc brushed gearboxes, independent suspension made from all 316 ss and machine aluminium 150mm of Z axes travel, 780mm wide 820mm long 48v 80ah batteries
I’m currently working on v2 which is 1.5m x 1.5m and improved manufacturability and less off the shelf electronics.
I know I’m pretty late responding to this but this looks super cool! Whats your plan for mounting tools on it? I imagine its not got enough clearance below for them to go underneath, are you going to put them on top and just give them a wider reach?
@ointhep same to you, I’d be super interested in hearing a bit more about how you’ve been using it :))
I had a few messages for details on my ‘mower’ project, here is a video of some testing I did of v1.0
It was a steep learning curve but I have learnt lots from v1.0
A full featured V2 is under way, the main points i’m working to improve are,
-Slip rings on steering motors to allow infinite steering rotations (awaiting custom sample from China)
removal of PWM board and servo style steering motors in favour of CAN connected drivers (I have had some boards designed on upwork in altium and made by PCBWAY)
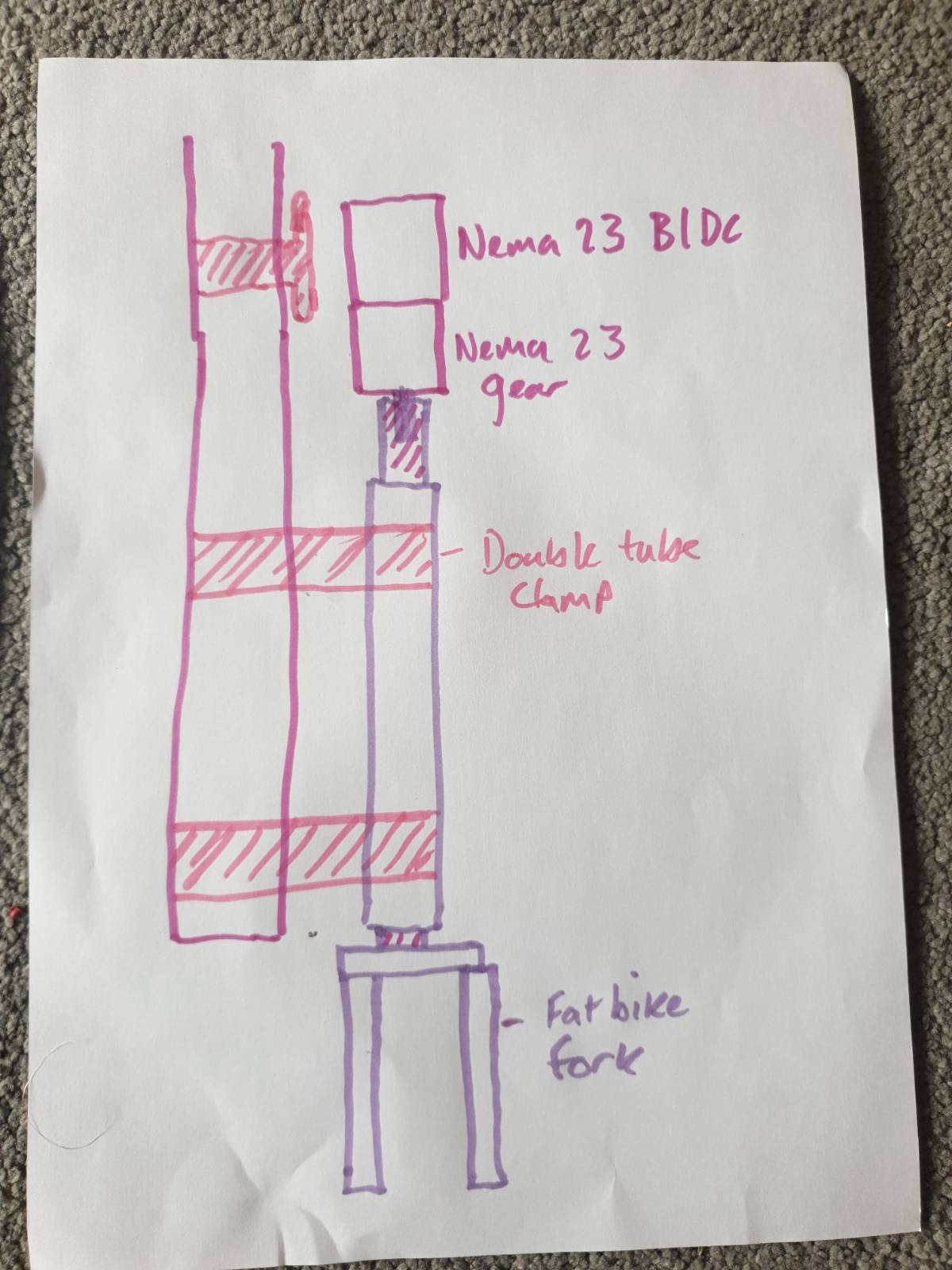
Additionally I’ve designed new planetary steering actuators with 24 to 1 reduction I’ve already had the gear sets EDM cut.
V1 had a mix of 48v and 24v circuits, i’ve simplified and kept it all 48v for v2
Simplification and capacity increase of battery setup, the new battery selection has a build in pre heater for cold mornings and the BMS has a CAN output. Just over 5kwh for v2
V2 drive motors will integrated magnetic incremental encoders (instead of relying on the hall sensors) and a larger tyre of 16"OD
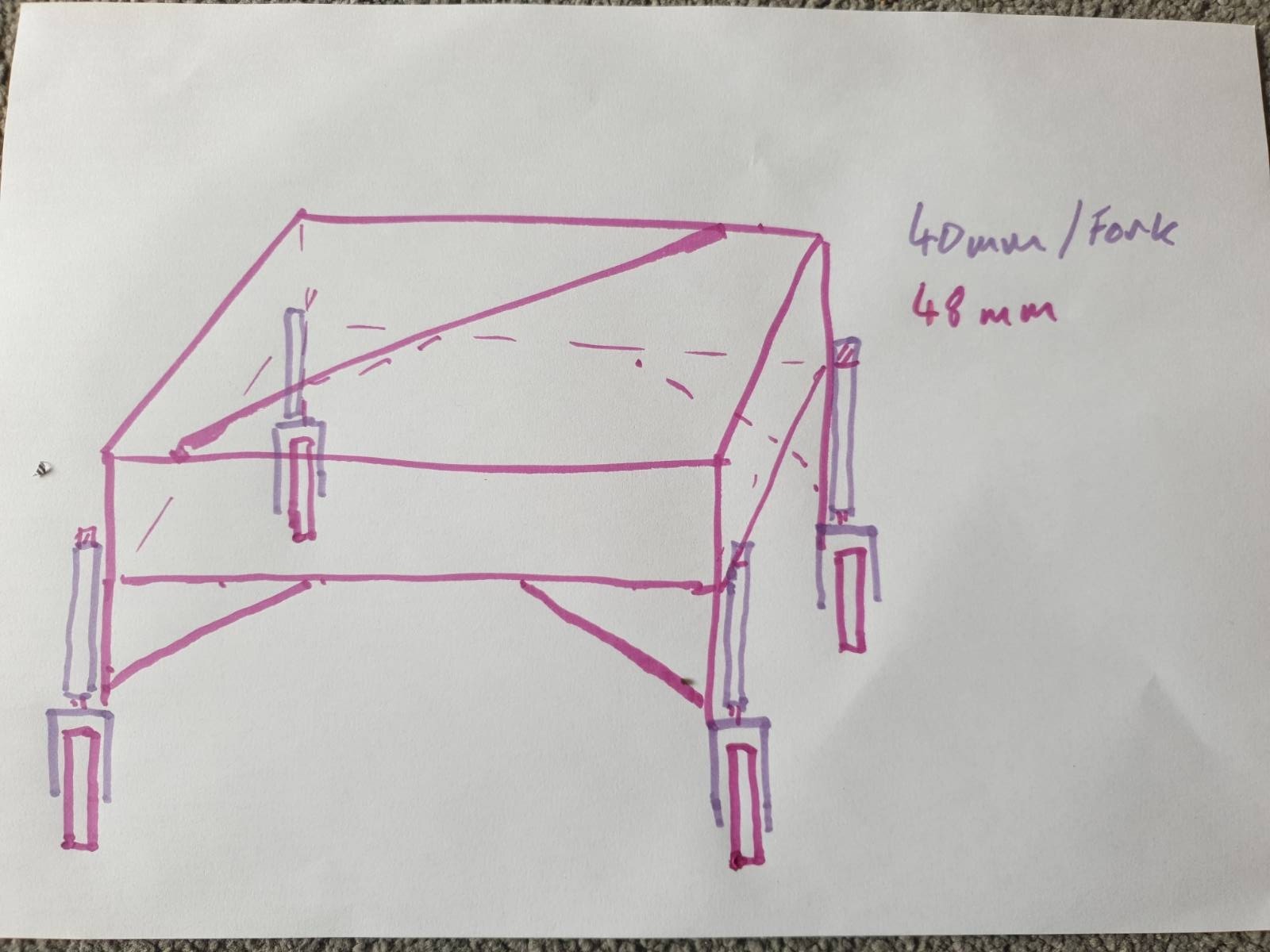
Overall size increase to 1500mm x 1500mm with 1200mm nominal height however width will telescope out by another 600mm or in 300mm and an additional height telescoping of 450mm
Done away with individual control arm style suspension in favour of telescopic extrusions to allow adjustable height and width.
General upgrades to hardware selection of camera, IMU maybe 3D LIDAR and the use of dual on rover RTK in addition to the base station.
V1 is on ROS2 with 2 control options either in a browser (which limits my steering options) or in the terminal with full use of features. V2 I’ll probably have an app made but I am un sure if I should stick with ROS2 or go full stack as I’m already in over my head.
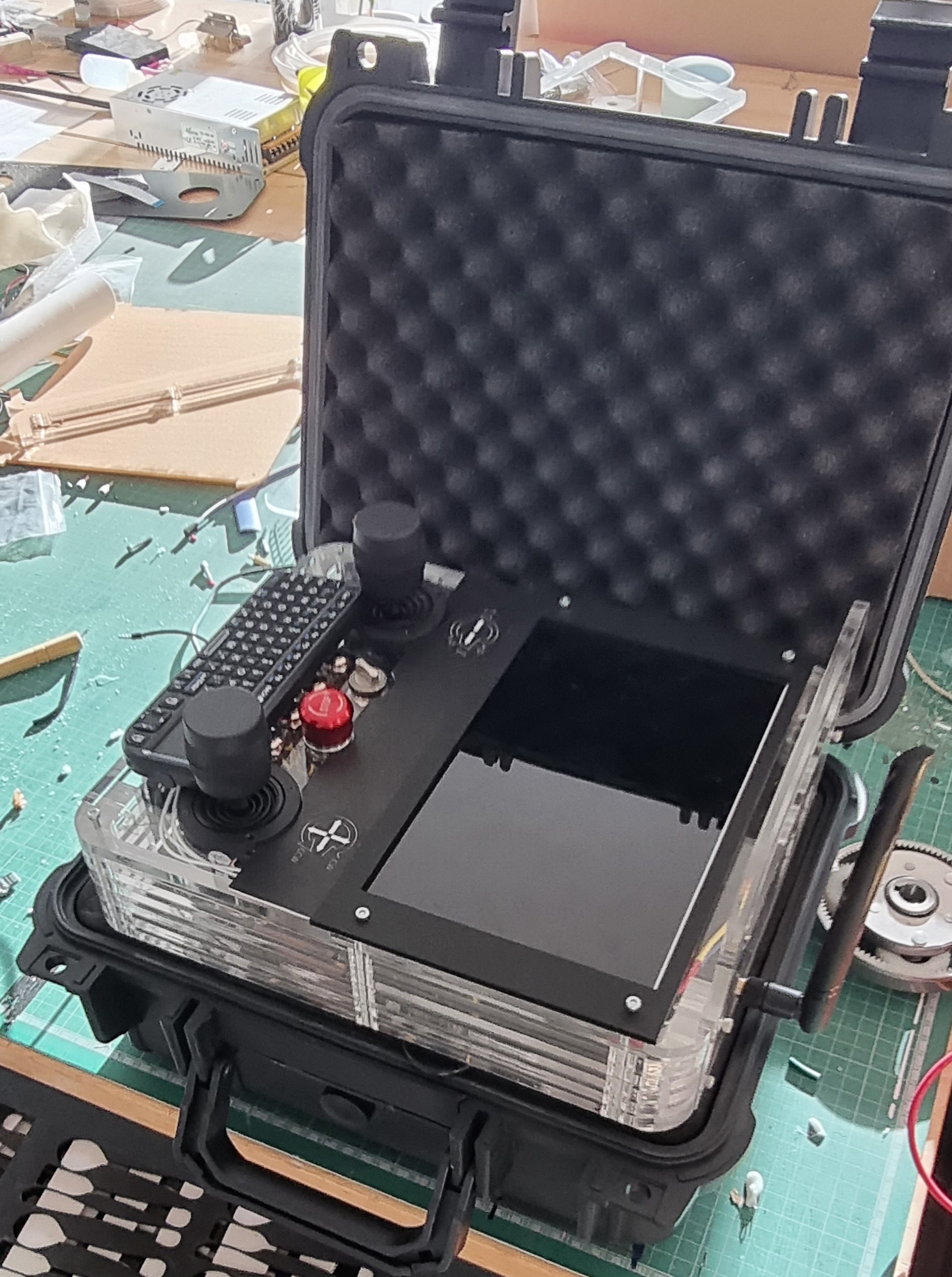
V1 remote control is a raspberry pi 4 with 8.9" touch screen V2 will need a complete re design that I haven’t even started to tackle.
Thanks for the links I hadn’t seen them, I wont be using the carrier board as V1 has jetson nano and I will probably stick with that for V2 if not upgrade to an orin, the motor drivers look great with the correct voltage for my needs and much better looking than what I had designed on upwork so I might just go that way!